
1. Architecture
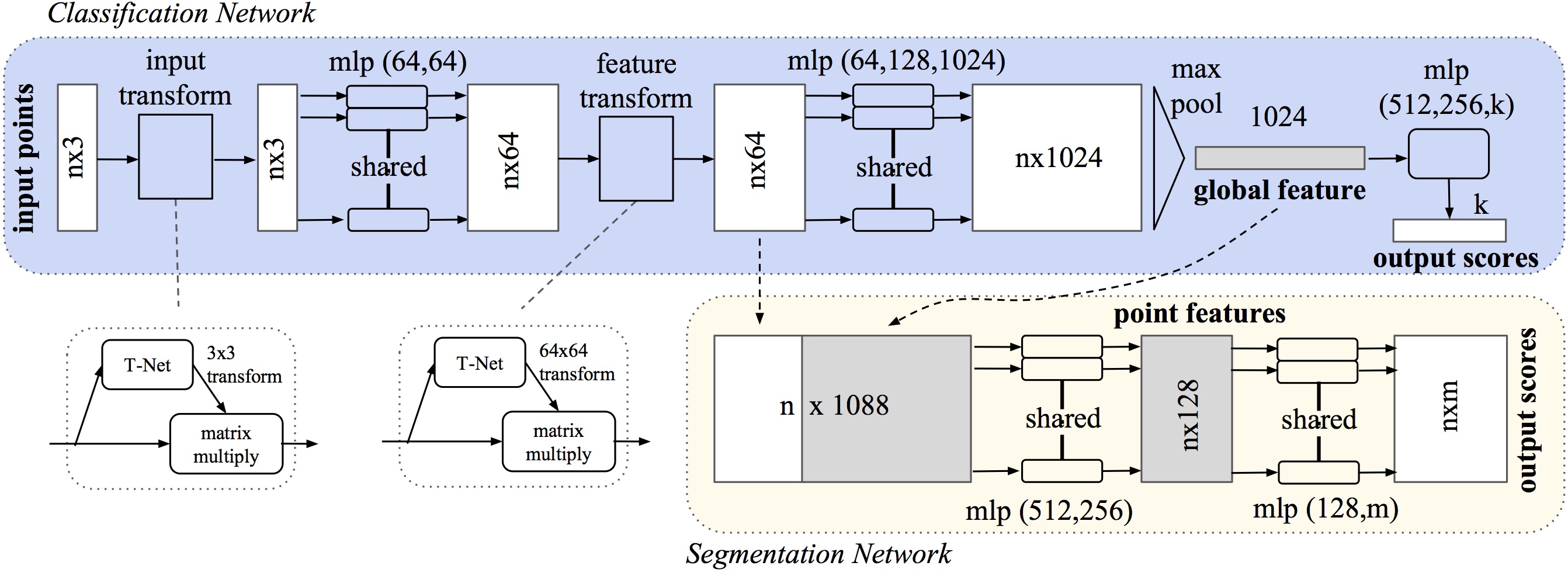
2.Feature Transformation Networks T-Net
PointNet solves two key problems:
- the invariance of point cloud transformation
- the disorder of point cloud.
For the invariance of point cloud transformation, the class of the point cloud object will not change after rotation, PointNet refers to the STN in 2D deep learning on this issue, and adds T-Net Network architecture here to spatially transform the input point cloud, making it as invariant to rotation as possible.
feat_transform.py:
1 | # -*- coding: utf-8 -*- |
3. Implementation of classification and segmentation
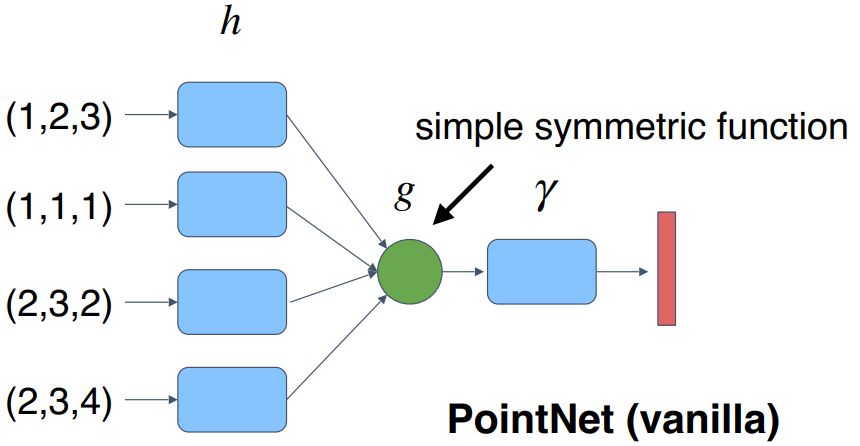
The important point is to ensure that the network is invariant to different input orders of the same point cloud. So the PointNet uses a symmetric function. In the implementation of pointnet network, the max-pooling strategy is adopted to solve the disorder problem of point cloud.
1 | # -*- coding: utf-8 -*- |
- 作者: Chris Yan
- 链接: https:/Yansz.github.io/2019/12/20/PointNet/
- 版权声明: 本博客所有文章除特别声明外,均采用 MIT 许可协议。转载请注明出处!